パッセンジャーとロコモーターについて
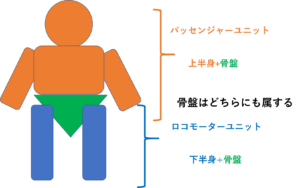
歩行中の身体は2つの機能的単位である『パッセンジャー(乗客:上半身と骨盤)』と『ロコモーター(機関車:下半身と骨盤)』に分けられます。連結部分である骨盤はパッセンジャーにもロコモーターにも含まれます。アナトミートレインでも電車に例えられますが、海外の方は例えもユニークですよね。
パッセンジャーは基本的に自分の姿勢保持にのみ責任を持ちます。このため歩行の正常メカニズムではこのパッセンジャーへの負荷が最小限になれば性能が高いと言えます。
つまりパッセンジャーはロコモーターによって運ばれる自立した単位である必要があります。
そのことによってパッセンジャーは前方への移動に依存することなく上半身や腕、頭部を用いた各種の活動を行うことが出来ます。(multi task:重複運動)
パッセンジャーがロコモーターの上で姿勢を正すことは1つの重要な役割を果たしています。つまりロコモーターがどの程度の筋活動を行うかはパッセンジャーの姿勢で決定されます。(Perry 1992)
パッセンジャーユニットは簡単に言えば上半身ですが頭部、頸部、体幹、骨盤、上肢で構成されています。(Elfman 1954)はロコモーターに乗っているパッセンジャーという単位を表す概念としてHAT(head、trunk、arm:頭、体幹、腕)を提唱しました。
ここまでパッセンジャーの話をさせていただきましたが、歩行において根本的にはこのパッセンジャーは姿勢保持が最重要な働きです。上肢の振り子は歩行をサポートする機能を持ちますが基本的には上肢が欠落していても歩行自体は可能です。仮に上肢を振らずに歩いたとしても歩行はつつがなく可能でしょう。
歩行時における上肢の振り子には能動的な部分と受動的な部分があります。下肢のスイング時には上肢は反対側がスイングされていますね。これはほとんど無意識ですが歩く速度を上げると自然と大きく揺れることになります。下肢のスイングに対して骨盤が回旋し追従しますので体幹は反対側に回旋しなければ次の下肢を振り出す際の捻りを作り出すことが出来ません。
そのため上半身は骨盤の回旋をコントロールするジャイロ機構を担う役割を果たしているとも言えます。
また骨盤は連結器である以上は上肢の振り子運動も下肢に伝達することは可能です。これが上肢の振り子運動の能動的な部分ですね。
立ち止まって思い切り上肢を交互にブンブン振り回していくと骨盤が回旋されるのを感じます。そのままわずかに下肢を出そうとすれば思いのほか下肢は大きく振り出され推進力を提供されますね。
このような能動的な部分は通常の歩行時にはあまり使われませんが、垂直飛びなどのジャンプ動作では大きな推進力を生みだします。
話を元に戻しますが、通常の歩行時はやはりパッセンジャーは安定化作用として働くことがメインと言って間違いないでしょう。
ちなみに、上肢の振り子を抑制しても歩行時のエネルギー消費に変化はなかった(Perry 1992)となっています。
次にロコモーターの話をしたいと思います。ロコモーターは下肢と骨盤でしたね。これを細かく分類すると仙腸関節、股関節、膝関節、距腿関節、距骨化関節、、中足指節間関節が含まれます。ロコモーターの骨の部分はテコとして働き動作機能に役立ちます。
片脚で57の筋肉がそれぞれの活動方法で動きの時間的流れと動作範囲を制御している(Tittel 1985)とあり、それぞれの下肢が交互に独自の役割を果たしパッセンジャーを支えて運びます。
また、先に述べたように骨盤はパッセンジャーとロコモーター両方に分類される連結器です。そのため上半身の力を下半身に下半身の力を上半身に伝達し調整する働きがあり、歩行において非常に重要な意味を持ちます。
ロコモーターの4つの機能について
①立脚安定性:絶え間ない姿勢の変化にかかわらず直立位の安定性が保証される。
②移動:駆動力を生じさせる。
③衝撃緩衝:身体重量から生じる床への衝撃を和らげる。
④省エネルギー:機能的な動きにより筋のエネルギー消費を少なくする。
立脚安定性
もし筋や靱帯が制御しなければ身体の各セグメントは侍従により床へ落下してしまいます。直立姿勢で安定性を得るには各セグメント(部分)の直立姿勢と各関節周りの筋活動の機能的バランスが必要となります。
各セグメントの重心は体重心と同様にそれを支える関節の直上にあるとき機能的な安定を得られエネルギー消費も抑えることが出来ます。
これを『受動的な安定性』と呼びます(Perry 1992)
私たちがよく使う『静的安定性』と同じですね。
しかし、次の3つの解剖学的実態ではこの安定性確保に不利な条件となります
①パッセンジャーとロコモーターの重量の違い:パッセンジャーは体重の70%でロコモーターは体重の30%しかありません。
②支持する下肢の関節の多さ
③骨端が丸い下肢の骨形状
2足歩行する人間にとって直立姿勢の保持は何よりも優先されます。
立っているときと歩いているときの安定性は床反力ベクトルで決定されます。床に体重がかかると反対方向に同じ大きさの反作用が現れます。(ニュートンの第3法則)つまり作用反作用の法則ですね。床反力ベクトルの延長線が床反力作用線です。この作用線の方向と関節中心との関係において回転モーメントの方向と大きさが決定されますので安定性保持のために必要な筋や靱帯の張力が生じます。
次に下肢の骨は長管骨ですが骨端は丸い形状をしていますね。これは機械的には不安定なので関節を制御する力が必要となるわけです。
関節に作用する3つの力
①床へ向かうセグメントの自重
②靭帯の張力
③筋力
ところで体の部分をセグメントで表していますが、ロボットゲームとかだとパーツもしくはパートですよね。そっちのほうがしっくりくる人はそっちでいいと思います。
この不安定な形状はどうしてなのかというと、運動性を高めるためです。安定性(静的安定性)と運動性(動的安定性)は反比例していますのでカクカクの骨や完全に安定した状態の物体では逆に運動するのに凄まじいエネルギーが必要です。不安定ならば僅かな力を加えれば簡単に運動を行いますのでその絶妙なバランスが人間の形というわけですね。
歩行という動的安定性を保つには外部モーメント(慣性力、重力、床反力)に対して反作用である内部モーメント(筋の収縮力、腱・靱帯・関節包、その他の軟部組織の受動的緊張)が拮抗し合うことで速度や方向をコントロールしています。
特に単脚支持の安定性の担保がなければ動的な歩行は困難です。
単脚支持の安定性
①身体質量の立脚下肢へのシフト
②骨盤と体幹の姿勢を保持するための股関節の安定化
この二つが保たれていれば交互型歩行が可能となり動的歩行を作り出すことが可能となります。
前方への動きとロッカーファンクション
前方への移動は内部モーメントと外部モーメントが共同して作り出しています。
この前方推進力の内部モーメントは足関節底屈筋と股関節の伸展筋である下腿三頭筋やハムストリングです。またこの下肢後面の筋肉は加速するためのプロパルジョンフォース(推進力)であり大腿四頭筋など前面の筋肉は歩行速度を減速し歩調を調整するブレーキングフォースとして働いています。
次に外部モーメントですが、これは筋肉以外の力で環境から与えられるものです。主に重力が外部モーメントの内容となります。
人間の歩行は立脚期中期に持ち上げられた重心が対側の立脚初期に至るまでに落下するのでこの落下加速度を利用して加速しています。
この加速のおかげで人間は非常に効率性の高い歩行を身に着けました。
ただし、重心が上下に運動するだけでは前方推進力にならないので、落下した力を前方に変換する必要があります。
その機能として足関節が行っている機構ががロッカーファンクションです。
力のモーメント(moment of force)とは、力学において、物体に回転を生じさせるような力の性質を表す量である。力の能率(ちからののうりつ)とも呼ばれる。また、明らかな場合は単にモーメントと呼ばれることもある。とくに機械などで固定された回転軸をもつ場合、その回転軸のまわりの力のモーメントをトルク(torque)またはねじりモーメントと呼ぶ。 単位として通常はニュートンメートル(N m)が用いられる。
人間の関節運動はどれも回転軸をもった回転運動でありそれを矢状面・前額面・水平面で複合的に運動させており、それぞれの面での回転運動を観察することが出来る。
ロッカーファンクションとは
①ヒールロッカー
イニシャルコンタクト時に踵骨の丸い表面を支点に転がるように始まる。カルカネオグレード(ヒールロッカーの活動)ともいう。
荷重を受け継ぐ際に前方へ落ちていく身体重量によって生じている勢いを受け止める働きがある。
イニシャルコンタクトからローディングレスポンスで起こる(歩行周期の0~12%)
メカニズム:イニシャルコンタクトとローディングレスポンスの間に床反力作用線は足関節の後方を通過し、足関節の重みによって増強された足関節底屈方向の外部モーメントが発生する。その際に踵の丸みが床に接触して支点を形成するため前方に転がるように運動します。これは重心落下を前方のベクトルに変換させてくれる非常に重要な運動です。この前方に転がることで重心落下は前方推進力となりつつ床への衝撃(股関節への床反力を)緩衝してくれるのです。
②アンクルロッカー
踵と前足部が床に平らに接地するまでの動き。プランティグレード(アンクルロッカーの活動)ともいう。
筋制御による足関節背屈機能のことです。下腿三頭筋の活動によって下腿は膝関節伸展のための安定した土台となり、同時に下腿は前方に傾き脚全体が前方へ傾くことが可能となります。ミッドスタンスで起こる。(歩行周期の12~31%)
メカニズム:この相では床反力作用線が足関節の前方に移動するために足関節に背屈方向の外部モーメントが発生し増加していきます。
この動きの軸は足関節で足底が床に接した時点から足関節が回転中心となる。ミッドスタンスで足全体は床に固定され足関節は背屈し下腿はその時の勢いで前方への動きを続けます。(inman1981,winter1983,perry1992)
③フォアフットロッカー
中足骨頭を支点として転がる動き。ディギグレード(フォアフットロッカーの活動)
引き続き起こり続ける脚の前方への動き可能にします。
※トゥロッカーも存在するがほとんどの健常者の歩行で見ることが出来ない。ので主に上記の3つが使われます。
ロッカーファンクションのロッカーとはロッキングチェアー(揺り椅子)の揺れテコ(ロッカー)のことです。
足の異なる二つの長軸
機能的長軸:健常な内側縦アーチは踵骨隆起から母趾の中足指節間関節の中心まで続く
解剖的長軸:後方の踵の中心から第2指の中足骨を通る
転がり運動は機能的な足の長軸に沿って生じる。(Lanz,Wachstum.1999)