
Out of my way. your fate.I'm going through 【運命よそこをどけ俺が通る】
歩行の記事についてはこちらに紹介しています
-

-
歩行とは~歩行の基本的知識と観察による歩行分析~
歩行とは 歩行とは主に脚を利用して荷重をかけながら推進方向へと移動する手段を指します。人類は直立二足歩行ですが、他の多く ...
続きを見る
-
-
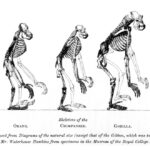
人間の進化と歩行
人間の進化と歩行について 人間と他の類人猿の最大の違いは何か?そうです『直立二足歩行』ですね。 他にも体毛や筋力、言語能 ...
続きを見る
-

-
平行棒内応用歩行練習
平行棒内歩行練習とは 理学療法士なので歩行訓練は色々と行うと思いますが、実際に行うにあたり、何を目的として行っているかが ...
続きを見る